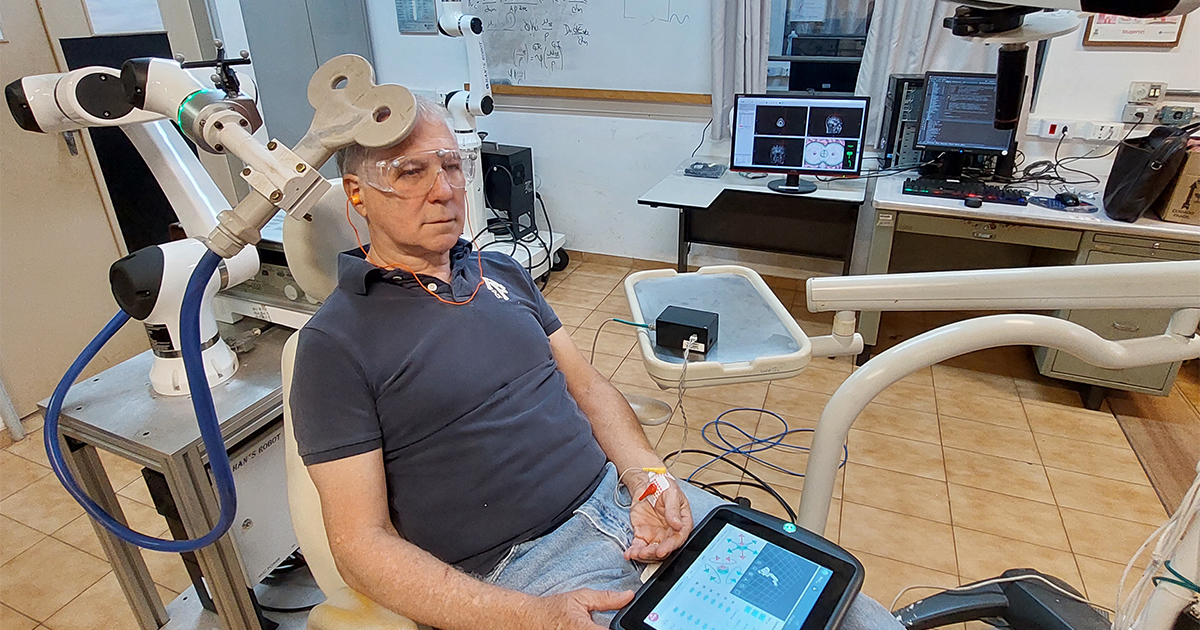
Para guiar a estimulação, é preciso um equipamento que ligue o mundo real ao virtual, que é a imagem do cérebro do paciente. Os equipamentos normalmente usam rastreadores com câmeras infravermelhas, “mas fixar os marcadores na cabeça do paciente pode ser complicado”, adianta Matsuda.
A proposta então foi usar Inteligência Artificial (IA) e a criação de um sistema especial que o pesquisador batizou de MarLe. Ele utiliza uma câmera simples, como uma webcam, para localizar a cabeça do paciente sem a necessidade de marcadores, tornando o procedimento mais simples e rápido, além de aumentar a precisão. “Com essa técnica que chamamos de MarLe, conseguimos remover essa necessidade (do uso de fixadores na cabeça) e garantir ainda mais a confiabilidade da técnica”, informa.
É que, segundo Matsuda, todos os sistemas utilizados até agora necessitam de algum tipo de fixação de marcadores na cabeça do paciente e estão sujeitos a erros durante o procedimento caso o marcador se movimente. “Perdemos o registro e não garante que a gente esteja indicando de maneira precisa o local desejado”, acrescenta o pesquisador, explicando sua proposta de usar a Inteligência Artificial (IA) em uma rede treinada de detecção facial. A equipe de Matsuda utilizou câmeras de baixo custo para localizar a cabeça do paciente, garantindo precisão e dispensando os marcadores fixos.
Assim, o sistema MarLe utiliza técnicas de visão computacional, acessando em tempo real, informado pelas imagens prévias de ressonância magnética, os locais no cérebro a serem estudados ou estimulados. Mais detalhes sobre o MarLe estão no artigo publicado pela Physical and Engineering Sciences in Medicine.
O estudo Sistema Robotizado para Estimulação Magnética Transcraniana Navegada, realizado por Matsuda durante seu doutorado, foi apresentado à FFCLRP em 2022. O pesquisador trabalhou sob orientação do professor Oswaldo Baffa Filho e coorientação de Victor Hugo Souza, pesquisador da Aalto University na Finlândia. Contou também com apoio da NeuroMat, Centro de Pesquisa, Inovação e Difusão em Neuromatemática (CEPID NeuroMat) fundado em 2013 na Universidade de São Paulo e financiado pela Fundação de Amparo à Pesquisa do Estado de São Paulo (FAPESP). O NeuroMat se dedica a integrar modelagem matemática e neurociência.
A pesquisa recebeu o prêmio Grande Área – Inovação da 12ª edição do Prêmio Tese Destaque USP.