Realizar uma operação de escolta militar não deve estar entre as missões mais simples de executar, especialmente em locais pouco explorados. Mas se depender dos resultados da pesquisa de mestrado de Alexander Jahn, ex-aluno da Universidade Federal de Minas Gerais (UFMG), não só as autoridades, mas muitos outros profissionais poderão contar com uma importante colaboração no futuro em tarefas que envolvam deslocamento. O especialista desenvolveu uma técnica capaz de coordenar um grupo de robôs para que eles guiem pessoas e animais em ambientes que não são totalmente conhecidos. Com isso, será possível ganhar tempo e evitar obstáculos ao longo do caminho.
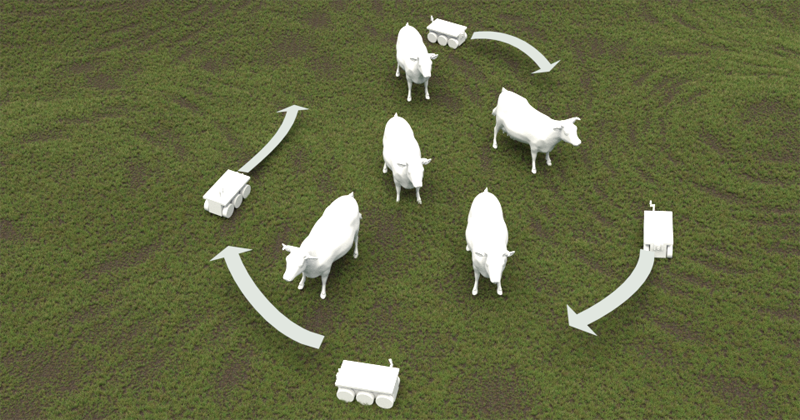
Durante a ação, os robôs se comunicam e formam um tipo de “cerca virtual” ao redor do agente que será conduzido. “Imagine que você deseja levar um grupo de animais de um lugar para outro em uma grande fazenda. Com os robôs coordenando todo o trajeto, o caminho percorrido será sempre o menor, além de proporcionar uma rota sem riscos, livre de buracos, por exemplo”, explica Luciano Pimenta, orientador de Jahn e pesquisador do Instituto Nacional de Ciência e Tecnologia para Sistemas Autônomos Cooperativos (InSAC), sediado na Escola de Engenharia de São Carlos (EESC) da USP.

O modelo proposto funciona como uma espécie de “leilão”, no qual os robôs competem para decidir quem será o responsável pelo próximo movimento do grupo. A cada “rodada”, será vencedor o robô que traçar o caminho mais rápido e livre de barreiras. A disputa é realizada de forma contínua até que o agente guiado chegue ao destino final.
Os robôs planejam a direção que devem seguir utilizando um algoritmo (sequência de comandos passada ao computador a fim de definir uma tarefa) baseado em amostragem. Ao longo da rota, as máquinas vão colhendo pequenas amostras de “bons caminhos” e, baseando-se nelas, prosseguem até o final do percurso. Além da técnica computacional, os robôs também contam com GPS, no caso de tarefas em ambientes externos, câmeras e diversos sensores, como os de localização, laser e ultrassom.
Sistemas Multirrobôs
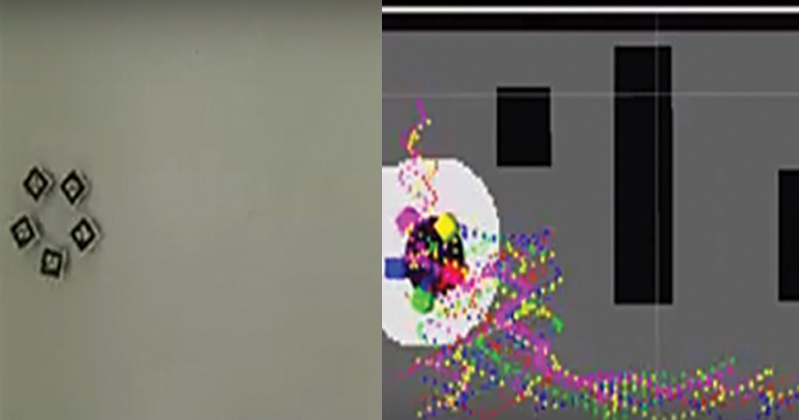
O algoritmo foi testado em pequenos robôs chamados Epucks e o professor afirma que a técnica pode ser aplicada em humanoides, drones ou até mesmo em carros autônomos. Segundo Pimenta, as pesquisas desenvolvidas nessa área, que leva o nome de Sistemas Multirrobôs, são realizadas com o objetivo de tornar mais eficiente a realização de determinada atividade, tendo em vista sua execução de forma coletiva. “À medida que você resolve um problema distribuindo funções, a solução se torna muito mais rápida. Acredito que esse seja o grande diferencial do projeto”, diz o cientista que também é professor da UFMG.
Jahn conta que uma das principais contribuições de sua pesquisa é a segurança que poderá ser proporcionada às pessoas quando produtos inspirados em seus estudos forem desenvolvidos. De acordo com o ex-aluno, há décadas a sociedade cada vez mais vem incorporando robôs na indústria, mas, fora dela, não existe um grande nível de desenvolvimento e automação. Trabalhos como o dele podem servir de estímulo para que outros pesquisadores trilhem o mesmo caminho e novas pesquisas impactem mais diretamente na rotina da população.
Da pesquisa nasceu o artigo Distributed Multi-Robot Coordination for Dynamic Perimeter Surveillance in Uncertain Environments, que foi um dos selecionados para ser apresentado na IEEE International Conference on Robotics and Automation (ICRA) 2017, principal conferência internacional da área de robótica, realizada entre os dias 29 de maio e 3 de junho, em Singapura. Dos 2.278 artigos submetidos para aprovação da organização do evento, apenas 41% deles foram aceitos, entre eles, o de Jahn e Pimenta. “Foi a melhor sensação da minha vida. Todo mundo da área de robótica conhece a ICRA e tem o desejo de participar”, comemora o ex-aluno, que iniciou o doutorado na Universidade Técnica da Renânia do Norte-Vestfália, na Alemanha, onde pretende desenvolver um sensor de localização em 3D de baixo custo.
Seu projeto de mestrado foi desenvolvido com a colaboração de David Saldaña e Mario Campos, doutorando e professor da UFMG, respectivamente, de André Santos, docente da Universidade Federal de Viçosa (UFV) e do pesquisador Reza Javanmard, ex-aluno de doutorado da UFMG. Além do InSAC, o trabalho recebeu apoio financeiro da Fundação de Amparo à Pesquisa do Estado de Minas Gerais (Fapemig), do Conselho Nacional de Desenvolvimento Científico e Tecnológico (CNPq) e da Coordenação de Aperfeiçoamento de Pessoal de Nível Superior (Capes).
(Henrique Fontes, Assessoria de Comunicação do InSAC)
Mais informações: (16) 3373-8740; e-mail comunica.insac@usp.br, na Assessoria de Comunicação do InSAC